-
2012年6月24日,神舟九号飞船与天宫一号目标飞行器实现手控交会对接,这是中国载人航天首次手控对接成功,标志着中国全面掌握了空间交会对接技术,若以天宫一号为参照物,神舟九号是________.
九年级物理填空题中等难度题查看答案及解析
-
2012年6月24日,神舟九号飞船与天宫一号目标飞行器实现手控交会对接,这是中国载人航天首次手控对接成功,标志着中国全面掌握了空间交会对接技术,若以天宫一号为参照物,神舟九号是 ________ .
九年级物理填空题简单题查看答案及解析
-
2012年6月24日,中国载人航天工程实现突破,神舟九号航天员成功驾驶飞船与天宫一号目标飞行器对接,这标志着我国成为世界上第三个完整掌握空间交会对接技术的国家,飞船与天宫一号对接后,沿椭圆型轨道飞行.此时以飞船为参照物,天宫一号是__________的(选填“静止”或“运动”).航天员与地面控制中心之间的信息交流靠_________传递的。
九年级物理填空题中等难度题查看答案及解析
-
按要求完成下列各题.
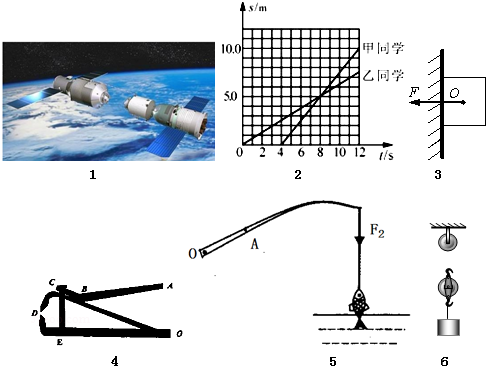
(1)如图1所示,2012年6月24日,“神舟九号”载人飞船与“天宫一号”目标飞行器成功实现手控交会对接.对接后,“神舟九号”相对于地面飞探中心是______的,相对于“天宫一号”是______的.(选填“运动”或“静止”)
(2)甲乙两同学沿平直路面步行,他们运动的路程随时间变化的规律如图2所示.根据S-t图象可知:甲乙同学都做______运动;甲同学比乙同学晚出发______s;______s时,他们运动的路程相等;两同学中,步行速度快的是______同学.
(3)如图3所示,用力F将木块压在墙上,请在图中画出木块受力的示意图.
(4)图4是指甲剪的示意图,它由三个杠杆ABC、OBD和OED组成.指甲剪剪指甲时,杠杆ABC属于______杠杆、杠杆OBD属于______杠杆、杠杆OED属于______ 杠杆.
(5)如图5所示的是钓鱼竿钓鱼的示意图,其中O为支点,A为手提鱼竿的作用点.请在图中画出鱼线对钓鱼竿拉力F2的力臂l2及最省力的动力F1及其力臂l1.
(6)在图6中画出最省力的滑轮组提升重物的绕绳方法.九年级物理解答题中等难度题查看答案及解析
-
2012年6月24日,“神州九号”与“天宫一号”成功实现了手控交会对接,这标志着我国载人航天事业又迈上了一个崭新的高度,在进行手控交会对接时,航天员控制飞船“缓慢”接近目标所选择的参照物是( )
A.“神州九号”宇宙飞船
B.“天宫一号”目标飞行器
C.地球
D.月亮九年级物理选择题中等难度题查看答案及解析
-
2012年6月16日我国“神舟九号”飞船成功发射,先后与“天宫一号”进行了两次交会对接任务,实现了神九与天宫的手控交会对接。这意味着中国完整掌握空间交会对接技术,具备了建设空间站的基本能力。如图,它们成功对接后,若以_______为参照物,飞船是静止的;当组合体一起匀速绕行时,它们的运动状态________(有/没有)改变;当它穿越大气层返回地面时,飞船表面温度升高,这是通过_______方式使其内能增加。
九年级物理填空题简单题查看答案及解析
-
2012年6月16日我国“神舟九号”飞船成功发射,先后与“天宫一号”进行了两次交会对接任务,实现了神九与天宫的手控交会对接。这意味着中国完整掌握空间交会对接技术,具备了建设空间站的基本能力。如图,它们成功对接后,若以_ __为参照物,飞船是静止的;当组合体一起匀速绕行时,它们的运动状态_ __ (有/没有)改变;当它穿越大气层返回地面时,飞船表面温度升高,这是通过_ __方式使其内能增加。
九年级物理填空题简单题查看答案及解析
-
2012年6月16日我国“神舟九号”飞船成功发射,先后与“天宫一号”进行了两次交会对接任务,实现了神九与天宫的手控交会对接.这意味着中国完整掌握空间交会对接技术,具备了建设空间站的基本能力.如图,它们成功对接后,若以________为参照物,飞船是静止的;当组合体一起匀速绕行时,它们的运动状态________(有/没有)改变;当它穿越大气层返回地面时,飞船表面温度升高,这是通过________方式使其内能增加.
九年级物理填空题中等难度题查看答案及解析
-
2012年6月16日我国“神舟九号”飞船成功发射,先后与“天宫一号”进行了两次交会对接任务,实现了神九与天宫的手控交会对接.这意味着中国完整掌握空间交会对接技术,具备了建设空间站的基本能力.如图,它们成功对接后,若以________为参照物,飞船是静止的;当组合体一起匀速绕行时,它们的运动状态________(有/没有)改变;当它穿越大气层返回地面时,飞船表面温度升高,这是通过________方式使其内能增加.
九年级物理填空题中等难度题查看答案及解析
-
2012年6月16日我国“神舟九号”飞船成功发射,先后与“天宫一号”进行了两次交会对接任务,实现了神九与天宫的手控交会对接.这意味着中国完整掌握空间交会对接技术,具备了建设空间站的基本能力.如图,它们成功对接后,若以________为参照物,飞船是静止的;当组合体一起匀速绕行时,它们的运动状态________(有/没有)改变;当它穿越大气层返回地面时,飞船表面温度升高,这是通过________方式使其内能增加.
九年级物理填空题中等难度题查看答案及解析