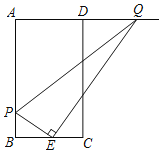
如图,在矩形ABCD中, ,
, ,点E是边BC的中点
,点E是边BC的中点 动点P从点A出发,沿着AB运动到点B停止,速度为每秒钟1个单位长度,连接PE,过点E作PE的垂线交射线AD与点Q,连接PQ,设点P的运动时间为t秒.
动点P从点A出发,沿着AB运动到点B停止,速度为每秒钟1个单位长度,连接PE,过点E作PE的垂线交射线AD与点Q,连接PQ,设点P的运动时间为t秒.
 当
当 时,
时, ______;
______;
 是否存在这样的t值,使
是否存在这样的t值,使 为等腰直角三角形?若存在,求出相应的t值,若不存在,请说明理由;
为等腰直角三角形?若存在,求出相应的t值,若不存在,请说明理由;
 当t为何值时,
当t为何值时, 的面积等于10?
的面积等于10?
九年级数学解答题中等难度题
如图,在矩形ABCD中,,,点E是边BC的中点动点P从点A出发,沿着AB运动到点B停止,速度为每秒钟1个单位长度,连接PE,过点E作PE的垂线交射线AD与点Q,连接PQ,设点P的运动时间为t秒.
当时,______;
是否存在这样的t值,使为等腰直角三角形?若存在,求出相应的t值,若不存在,请说明理由;
当t为何值时,的面积等于10?
九年级数学解答题中等难度题
如图,正方形ABCD的边长为4,点M是CD的中点,动点E从点B出发,沿BC运动,到点C时停止运动,速度为每秒1个长度单位;动点F从点M出发,沿M→D→A远动,速度也为每秒1个长度单位:动点G从点D出发,沿DA运动,速度为每秒2个长度单位,到点A后沿AD返回,返回时速度为每秒1个长度单位,三个点的运动同时开始,同时结束.设点E的运动时间为x,△EFG的面积为y,下列能表示y与x的函数关系的图象是( )

A.  B.
B. 
C.  D.
D. 
九年级数学单选题困难题查看答案及解析
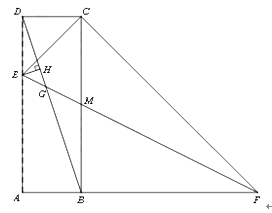
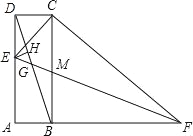
如图,已知矩形ABCD中,AB=2,BC=6,点E从点D出发,沿DA方向以每秒1个单位的速度向点A运动,点F从点B出发,沿射线AB以每秒3个单位的速度运动,当点E运动到点A时,E、F两点停止运动.连接BD,过点E作EH⊥BD,垂足为H,连接EF,交BD于点G,交BC于点M,连接CF. 给出下列结论:①△CDE∽△CBF;②∠DBC=∠EFC;③  ;④GH的值为定值
;④GH的值为定值 ;上述结论中正确的个数为( )
;上述结论中正确的个数为( )
A. 1 B. 2 C. 3 D. 4
九年级数学单选题中等难度题查看答案及解析
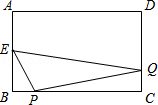
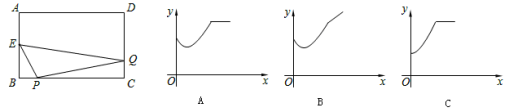
如图,在矩形ABCD中,AB=4,BC=6,E为AB中点,动点P从点B开始沿BC方向运动到点C停止,动点Q从点C开始沿CD﹣DA方向运动,与点P同时出发,同时停止.这两点的运动速度均为每秒1个单位.若设他们的运动时间为x(秒),△EPQ的面积为y,则y与x之间的函数关系的图象大致是( )
A. B.
B. C.
C. D.
D.
九年级数学选择题中等难度题查看答案及解析
如图,在矩形ABCD中,AB=4,BC=6,E为AB中点,动点P从点B开始沿BC方向运动到点C停止,动点Q从点C开始沿CD-DA方向运动,与点P同时出发,同时停止.这两点的运动速度均为每秒1个单位.若设他们的运动时间为x(秒),△EPQ的面积为y,则y与x之间的函数关系的图象大致是( )

九年级数学选择题中等难度题查看答案及解析
九年级数学解答题中等难度题查看答案及解析
如图,矩形ABCD中,对角线AC,BD交于点O,E,F分别是边BC,AD的中点,AB=3,BC=4,一动点P从点B出发,沿着B﹣A﹣D﹣C在矩形的边上运动,运动到点C停止,点M为图1中某一定点,设点P运动的路程为x,△BPM的面积为y,表示y与x的函数关系的图象大致如图2所示.则点M的位置可能是图1中的( )
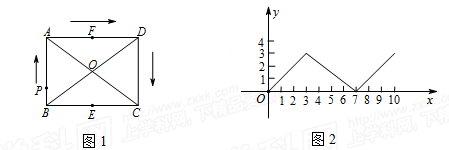
A.点C B.点F C.点D D.点O
九年级数学选择题简单题查看答案及解析
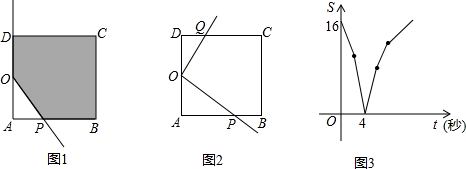
某校机器人兴趣小组在如图①所示的矩形场地上开展训练,机器人从点A出发,在矩形ABCD边上沿着A→B→C→D的方向匀速移动,到达点D时停止移动,已知AD=6个单位长度,机器人的速度为1个单位长度/s且其移动至拐角处调整方向所需时间忽略不计.设机器人所用时间为t(s)时,其所在位置用点P表示,P到对角线BD的距离(即垂线段PQ的长)为d个单位长度,其中d与t的函数图象如图②所示.
(1)图②中函数图象与纵轴的交点的纵坐标 在图①中表示一条线段的长,请在图①中画出这条线段.
在图①中表示一条线段的长,请在图①中画出这条线段.
(2)求图②中a的值;
(3)如图②,点M、N分别在线段EF、GH上,线段MN平行于横轴,M、N的横坐标分别为t1、t2.设机器人用了t1(s)到达点P1处,用了t2(s)到达点P2处(见图①).若CP1+CP2=7,求t1、t2的值.

九年级数学解答题中等难度题查看答案及解析
如图,在矩形ABCD中,AB=3cm,BC=6cm.点P从点D出发向点A运动,运动到点A即停止;同时,点Q从点B出发向点C运动,运动到点C即停止,点P、Q的速度都是1cm/s.连接PQ、AQ、CP.设点P、Q运动的时间为ts.
当t为何值时,四边形ABQP是矩形;
当t为何值时,四边形AQCP是菱形;
分别求出(2)中菱形AQCP的周长和面积.

九年级数学解答题中等难度题查看答案及解析
如图,已知在矩形ABCD中,AB=2,BC=6,点E从点D出发,沿DA方向以每秒1个单位的速度向点A运动,点F从点B出发,沿射线AB以每秒3个单位的速度运动,当点E运动到点A时,E、F两点停止运动.连结BD,过点E作EH⊥BD,垂足为H,连结EF,交BD于点G,交BC于点M,连结CF.
(1)△CDE与△CBF相似吗?为什么?
(2)求证:∠DBC=∠EFC;
(3)同线段GH的值是定值吗?如果不是,请说明理由;如果是,求出这个定值.
九年级数学解答题中等难度题查看答案及解析
(2017江苏省苏州市)某校机器人兴趣小组在如图①所示的矩形场地上开展训练.机器人从点A出发,在矩形ABCD边上沿着A→B→C→D的方向匀速移动,到达点D时停止移动.已知机器人的速度为1个单位长度/s,移动至拐角处调整方向需要1s(即在B、C处拐弯时分别用时1s).设机器人所用时间为t(s)时,其所在位置用点P表示,P到对角线BD的距离(即垂线段 PQ的长)为d个单位长度,其中d与t的函数图象如图②所示.
(1)求AB、BC的长;
(2)如图②,点M、N分别在线段EF、GH上,线段MN平行于横轴,M、N的横坐标分别为t1、t2.设机器人用了t1(s)到达点P1处,用了t2(s)到达点P2处(见图①).若CP1+CP2=7,求t1、t2的值.

九年级数学解答题困难题查看答案及解析