-
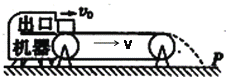
当代人工智能无处不在,大大减少了人工的成本。某智能快递分拣中心,通过智能大脑分拣好的包裹从机器的出口以初速度 =0.2m/s滑上由理想电动机带动的水平传送带,传送带以速度
=0.2m/s滑上由理想电动机带动的水平传送带,传送带以速度 =3m/s匀速运动,传送带足够长,设包裹质量为m=1Kg,它与传送带间的动摩擦因数为
=3m/s匀速运动,传送带足够长,设包裹质量为m=1Kg,它与传送带间的动摩擦因数为 =0.2,传送带左右两端相距L=5m,如图所示,该电动机每传送一个包裹时,重力加速度为g=10 m/s2,求:
=0.2,传送带左右两端相距L=5m,如图所示,该电动机每传送一个包裹时,重力加速度为g=10 m/s2,求:
(1)包裹从左端到右端的时间
(2)包裹从左端到右端的过程中,摩擦力对物体所做的功
(3)包裹从左端到右端的过程中,电动机多消耗的电能
-
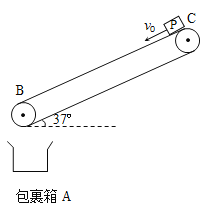
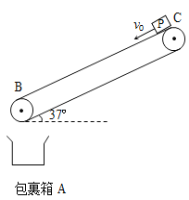
某智能分拣装置如图所示,A为包裹箱,BC为传送带.传送带保持静止,包裹P 以初速度v0滑上传送带,当P滑至传送带底端时,该包裹经系统扫描检测,发现不应由A收纳,则被拦停在B处,且系统启动传送带轮转动,将包裹送回C处.已知v0=3m/s,包裹P与传送带间的动摩擦因数μ=0.8,传送带与水平方向夹角θ=37º,传送带BC长度L=10m,重力加速度g=10m/s2,sin37º=0.6,cos37º=0.8,求:


(1)包裹P沿传送带下滑过程中的加速度大小和方向;
(2)包裹P到达B时的速度大小;
(3)若传送带匀速转动速度v=2m/s,包裹P经多长时间从B处由静止被送回到C处;
(4)若传送带从静止开始以加速度a加速转动,请写出包裹P送回C处的速度vc与a的关系式,并画出vc2-a图象.
-
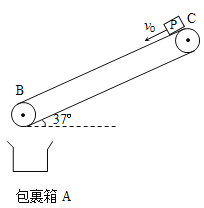
某智能分拣装置如图所示,A为包裹箱,BC为传送带.传送带保持静止,包裹P 以初速度v0滑上传送带,当P滑至传送带底端时,该包裹经系统扫描检测,发现不应由A收纳,则被拦停在B处,且系统启动传送带轮转动,将包裹送回C处.已知v0=3m/s,包裹P与传送带间的动摩擦因数μ=0.8,传送带与水平方向夹角θ=37º,传送带BC长度L=10m,重力加速度g=10m/s2,sin37º=0.6,cos37º=0.8,求:
(1)包裹P沿传送带下滑过程中的加速度大小和方向;
(2)包裹P到达B时的速度大小;
(3)若传送带匀速转动速度v=2m/s,包裹P经多长时间从B处由静止被送回到C处;
(4)若传送带从静止开始以加速度a加速转动,请写出包裹P送回C处的速度vc与a的关系式,并画出vc2-a图象.
-
某智能分拣装置如图所示,A为包裹箱,BC为传送带.传送带保持静止,包裹P 以初速度v0滑上传送带,当P滑至传送带底端时,该包裹经系统扫描检测,发现不应由A收纳,则被拦停在B处,且系统启动传送带轮转动,将包裹送回C处.已知v0=3m/s,包裹P与传送带间的动摩擦因数μ=0.8,传送带与水平方向夹角θ=37º,传送带BC长度L=10m,重力加速度g=10m/s2,sin37º=0.6,cos37º=0.8,求:
(1)包裹P沿传送带下滑过程中的加速度大小和方向;
(2)包裹P到达B时的速度大小;
(3)若传送带匀速转动速度v=2m/s,包裹P经多长时间从B处由静止被送回到C处;
(4)若传送带从静止开始以加速度a加速转动,请写出包裹P送回C处的速度vc与a的关系式,并画出vc2-a图象.
-
某智能分拣装置如图所示,A为包裹箱,BC为传送带.传送带保持静止,包裹P 以初速度v0从C滑上传送带,当P滑至传送带底端时,该包裹经系统扫描检测,发现不应由A收纳,则被拦停在B处,且系统启动传送带轮转动,将包裹送回C处.已知v0=3m/s,包裹P与传送带间的动摩擦因数μ=0.8,传送带与水平方向夹角θ=37º,传送带BC长度L=10m,重力加速度g=10m/s2,sin37º=0.6,cos37º=0.8,求:
(1)包裹P沿传送带下滑过程中刚到达B时的速度大小;
(2)若传送带匀速转动速度v=2m/s,包裹 P经多长时间从B处由静止被送回到C处;
(3)若传送带从静止开始以加速度a加速转动,请写出包裹P送回C处的速度vc与a的关系式,并画出 -a图象.
-a图象.
-
看过2012年春晚的人们,是否还记得央视春晚《儿童节目》﹣“机器人总动员”的情景. 机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动.它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作.图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2).
(1)试在图b中完成坐标系的建立并画出机器人的运动轨迹.
(2)计算整个过程中机器人的位移大小.
-
央视春晚《儿童节目》――“机器人总动员”中机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动.它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作.图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2).
(1)说明怎样建立坐标系,并在合适的坐标系中,画出机器人的运动轨迹.
(2)计算整个过程中机器人的位移大小.
-
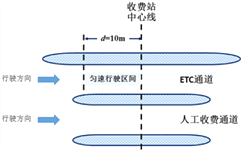
甬金高速东阳出口收费站增设了ETC(不停车电子收费系统)通道,汽车通过ETC通道和人工收费通道的流程如图所示,假设汽车以v0=20m/s朝收费站沿直线行驶,在靠近收费站时需要提前减速:如果过ETC通道,在收费站中心线前d=10m处减速至v=5m/s,匀速通过中心线后,再加速至v0正常行驶;如果过人工收费通道,在中心线处速度减至零,经过△t=20s缴费成功后,再启动汽车匀加速至v0正常行驶.设汽车加速和减速过程均为匀变速,且加速度大小均为a=1m/s2.求:
(1)汽车过ETC通道时,从开始减速到刚恢复正常行驶过程中所需要的时间;
(2)汽车过人工收费通道,从开始减速到恢复正常行驶过程中的总位移大小;
(3)汽车通过ETC通道比通过人工收费通道节约的时间是多少.
-
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作。图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2)。
(1)试在图b中完成坐标系的建立并画出机器人的运动轨迹。
(2)计算整个过程中机器人的位移大小。
-
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作。图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2)。
(1)试在图b中完成坐标系的建立并画出机器人的运动轨迹。
(2)计算整个过程中机器人的位移大小。
 =0.2m/s滑上由理想电动机带动的水平传送带,传送带以速度
=0.2m/s滑上由理想电动机带动的水平传送带,传送带以速度 =3m/s匀速运动,传送带足够长,设包裹质量为m=1Kg,它与传送带间的动摩擦因数为
=3m/s匀速运动,传送带足够长,设包裹质量为m=1Kg,它与传送带间的动摩擦因数为 =0.2,传送带左右两端相距L=5m,如图所示,该电动机每传送一个包裹时,重力加速度为g=10 m/s2,求:
=0.2,传送带左右两端相距L=5m,如图所示,该电动机每传送一个包裹时,重力加速度为g=10 m/s2,求: