-
有一质量为m=2Kg的物体静止于水平面上的D点,水平面BC与倾角为θ=37°的传送带AB平滑连接,转轮逆时针转动且传送带速度为v=1.8m/s,物体与水平面间的动摩擦因数为μ1=0.6,物体与传送带间的动摩擦因数为μ2=0.8.DB距离为L1=48m,传送带AB长度为L2=5.15m.在t=0s时,将一水平向左的恒力F=20N作用在该物体上,4s后撤去该力.(sin37°=0.6,cos37°=0.8,g=10m/s2)求:
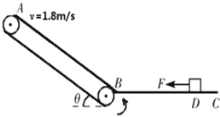
(1)拉力F作用在该物体上时,物体在水平面上运动的加速度大小?
(2)物体到达B点时的速度大小?
(3)物体从D点到A点运动的总时间为多少?
-
如图所示,倾角θ=37°的粗糙传送带与光滑水平面通过半径可忽略的光滑小圆弧平滑连接,传送带始终以v=3m/s的速率顺时针匀速转动,A、B、C滑块的质量为mA=1kg,mB=2kg,mC=3kg,(各滑块均视为质点).A、B间夹着质量可忽略的火药.k为处于原长的轻质弹簧,两端分别与B和C连接.现点燃火药(此时间极短且不会影响各物体的质量和各表面的光滑程度),滑块A以6m/s水平向左冲出,接着沿传送带向上前进,已知滑块A与传送带间的动摩擦因数为μ=0.75,传送带与水平面足够长,取g=10m/s2,sin37°=0.6,cos37°=0.8.求:
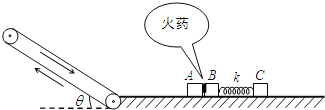
(1)滑块A沿传送带向上能滑的最大距离?
(2)滑块B通过弹簧与C相互作用的过程中,弹簧又到原长时B、C的速度?
(3)滑块A追上滑块B时能粘住,试定量分析在A与B相遇的各种可能情况下,A、B、C及弹簧组成系统的机械能范围?
-
如图所示,倾角θ=37º的粗糙传送带与光滑水平面通过半径可忽略的光滑小圆弧平滑连接,传送带始终以v=3m/s的速率顺时针匀速转动,A、B、C滑块的质量分别为mA=1kg,mB=2kg,mC=3kg,(各滑块均可视为质点).A、B间夹着质量可忽略的火药.k为处于原长的轻质弹簧,两端分别与B、C连接.现点燃火药(此时间极短且不会影响各物体的质量和各表面的光滑程度),滑块A以6m/s的速度水平向左冲出,接着沿传送带向上运动,已知滑块A与传送带间的动摩擦因数为μ=0.75,传送带与水平面足够长,取g=10m/s2,sin37°=0.6,cos37°=0.8.
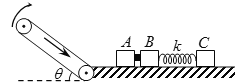
(1)计算滑块A沿传送带向上滑行的最大距离x;
(2)在滑块B、弹簧、滑块C相互作用的过程中,当弹簧第一次恢复原长时(此时滑块A还未追上滑块B),计算B、C的速度;
(3)若滑块A追上滑块B时能粘住,定量分析在A与B相遇的各种可能情况下,A、B、C及弹簧组成系统的机械能范围.(提示:因A、B相遇时,B的速度不可预知,故粘住后A、B、C及弹簧组成系统的机械能有各种可能值)
-
如图所示,水平传送带的左端与一倾角θ=37°的粗糙斜面平滑连接,一个小滑块(可视为质点)从斜面上的A点由静止释放,沿斜面滑下并冲上传送带,传送带以恒定速率v=2m/s逆时针转动.已知小滑块的质量m=2kg,斜面上A点到斜面底端的长度s=9m,传送带的长度为L=10m,小滑块与斜面的动摩擦因数μ1=0.50,小滑块与传送带间动摩擦因数μ2=0.40,g=10m/s2.求:
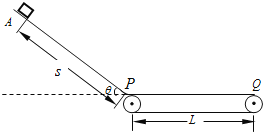
(1)小滑块到达斜面底端P的速度大小;
(2)a.判断冲上传送带的小滑块是否可以运动到传送带的右端Q;
b.若小滑块可以运动到Q,试求小滑块从P点运动到Q点的过程中摩擦力分别对小滑块和传送带做的功;若小滑块不能达到Q,试求小滑块从P点开始再次运动到P点过程中摩擦力分别对小滑块和传送带做的功;
(3)小滑块在斜面和传送带上运动的整个过程中,小滑块相对于地面的总路程.
-
滑板运动是崇尚自由的一种运动方式.若将滑道简化为倾角为θ=37°的斜面AB及水平面BC(平面在右侧,斜面在左侧),斜面与水平面平滑连接,运动员简化为质量m=2kg的物体,置于水平面上的D点.DB间距d=7m,物体与斜面、水平面间的动摩擦因数均为μ=0.2,将一水平向左的恒力F=8N作用在该物体上,t=2s后撤去该力,不考虑物体经过B点时的能量损失,重力加速度取g=10m/s2,斜面足够长,撤去恒力F后,物体经过多长时间第二次经过B点?
-
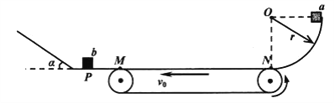
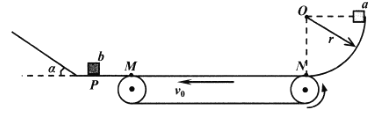
如上图所示为某自动控制系统的装置示意图,装置中间有一个以v0=3m/s的速度逆时针匀速转动的水平传送带,传送带左端点M与光滑水平面相切,PM比较长,水平面左侧与一倾角 =37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.8m的光滑四分之一圆弧相切,小物块a从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数
=37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.8m的光滑四分之一圆弧相切,小物块a从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数 =0.25,MN间的距离L=2m,g=10m/s2,sin37°=0.6,cos37°=0.8,求:
=0.25,MN间的距离L=2m,g=10m/s2,sin37°=0.6,cos37°=0.8,求:
(1)第一次碰撞前物块a在传送带上运动的时间;
(2)第一次碰撞后物块b在斜面上运动的时间(物块b冲上斜面无机械能损失);
(3)两物块在第3次碰撞后到第4次碰撞前,物块a在传送带上运动产生的摩擦热。
-
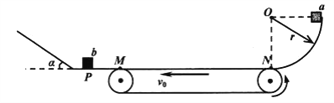
如上图所示为某自动控制系统的装置示意图,装置中间有一个以v0=3m/s的速度逆时针匀速转动的水平传送带,传送带左端点M与光滑水平面相切,PM比较长,水平面左侧与一倾角=37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.8m的光滑四分之一圆弧相切,小物块a从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数=0.25,MN间的距离L=2m,g=10m/s2,sin37°=0.6,cos37°=0.8,求:
(1)第一次碰撞前物块a在传送带上运动的时间;
(2)第一次碰撞后物块b在斜面上运动的时间(物块b冲上斜面无机械能损失);
(3)两物块在第3次碰撞后到第4次碰撞前,物块a在传送带上运动产生的摩擦热。
-
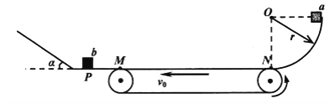
如上图所示为某自动控制系统的装置示意图,装置中间有一个以v0=3m/s的速度逆时针匀速转动的水平传送带,传送带左端点M与光滑水平面相切,PM比较长,水平面左侧与一倾角=37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.8m的光滑四分之一圆弧相切,小物块a从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数=0.25,MN间的距离L=2m,g=10m/s2,sin37°=0.6,cos37°=0.8,求:
(1)第一次碰撞前物块a在传送带上运动的时间;
(2)第一次碰撞后物块b在斜面上运动的时间(物块b冲上斜面无机械能损失);
(3)两物块在第3次碰撞后到第4次碰撞前,物块a在传送带上运动产生的摩擦热。
-
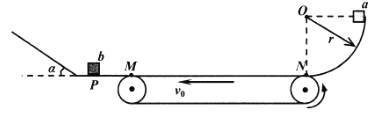
如图所示为某自动控制系统的装置示意图,装置中间有一个以v0=3m/s的速度逆时针匀速转动的水平传送带,传送带左端点M与光滑水平面相切,水平面左侧与一倾角α=37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.2m的光滑四分之一圆弧相切,小物块α从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数μ=0.25,MN间的距离L=1.2m, g=10m/s2,sin37°=0.6,cos37°=0.8,求:
(1)物块a运动到N点时受到的支持力;
(2)物块b第一次沿斜面上滑的时间;
(3)两物块在第n次碰撞后到第n+1次碰撞前,物块a在传送带上运动产生的摩擦热。
-
如图所示为某自动控制系统的装置示意图,装置中间有一个以v0=3m/s的速度逆时针匀速转动的水平传送带,传送带左端点M与光滑水平面相切,水平面左侧与一倾角α=37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.2m的光滑四分之一圆弧相切,小物块α从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数μ=0.25,MN间的距离L=1.2m, g=10m/s2,sin37°=0.6,cos37°=0.8,求:
(1)物块a运动到N点时受到的支持力;
(2)物块b第一次沿斜面上滑的时间;
(3)两物块在第n次碰撞后到第n+1次碰撞前,物块a在传送带上运动产生的摩擦热。
 =37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.8m的光滑四分之一圆弧相切,小物块a从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数
=37°的光滑斜面平滑连接。靠近斜面底端的P点处安装有自动控制系统,当小物块b每次向右经过P点时都会被系统瞬时锁定从而保持静止。传送带N端与半径r=0.8m的光滑四分之一圆弧相切,小物块a从圆弧最高点由静止下滑后滑过传送带,经过M点后控制系统会使静止在P点的小物块b自动解锁,之后两物块发生第一次弹性碰撞。已知两物块的质量mb=2ma=2kg,两物块均可视为质点,物块与传送带间的动摩擦因数 =0.25,MN间的距离L=2m,g=10m/s2,sin37°=0.6,cos37°=0.8,求:
=0.25,MN间的距离L=2m,g=10m/s2,sin37°=0.6,cos37°=0.8,求: