日本筑波大学研制出了世界上第一种商业外骨骼机器人,这种装置能帮助行动不便者以一定速度行走,某人利用该外骨骼机器人从静止开始,沿直线勻加速行走了4s,达到最大速度6m/s后,又以1.2m/s2的加速度沿直线匀减速行走了3s,然后做匀速直线 运动.求:

(1)匀加速运动时的加速度大小;
(2)匀速运动时的速度大小;
(3)前7s过程中人的总位移大小.
高一物理解答题中等难度题
日本筑波大学研制出了世界上第一种商业外骨骼机器人,这种装置能帮助行动不便者以一定速度行走,某人利用该外骨骼机器人从静止开始,沿直线勻加速行走了4s,达到最大速度6m/s后,又以1.2m/s2的加速度沿直线匀减速行走了3s,然后做匀速直线 运动.求:
(1)匀加速运动时的加速度大小;
(2)匀速运动时的速度大小;
(3)前7s过程中人的总位移大小.
高一物理解答题中等难度题
日本筑波大学研制出了世界上第一种商业外骨骼机器人,这种装置能帮助行动不便者以一定速度行走,某人利用该外骨骼机器人从静止开始,沿直线勻加速行走了4s,达到最大速度6m/s后,又以1.2m/s2的加速度沿直线匀减速行走了3s,然后做匀速直线 运动.求:
(1)匀加速运动时的加速度大小;
(2)匀速运动时的速度大小;
(3)前7s过程中人的总位移大小.
高一物理解答题中等难度题查看答案及解析
如图(甲)所示,某人对“用频闪照相研究平抛运动规律”的装置进行了改进,在装置两侧都装上了完全相同的斜槽A、B,但位置有一定高度差,白色、黑色两相同小球分别由两斜槽某位置静止释放。实验后对照片做一定处理并建立直角坐标系,得到如图(乙)所示的部分小球位置示意图。

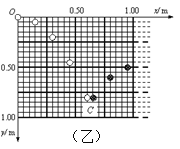
(1)观察改进后的实验装置可以发现,斜槽末端都接有一小段水平槽,这样做的目的是_____________________________。
(2)根据部分小球位置示意图,下列说法正确的是(_____)
A.闪光间隔为0.1s
B.白色球抛出点坐标(0,0)
C.黑色球抛出点坐标(0.95,0.50)
D.两球从斜槽上静止释放时距水平槽的高度相同
高一物理实验题简单题查看答案及解析
Extreme Access Flyers是NASA研制的火星探测机器人,这种机器人能够在非常稀薄甚至完全没有空气的环境下运作。已知火星的质量为地球质量的 ,火星的半径为地球半径的
,火星的半径为地球半径的 ,假设空气的阻力可忽略不计。在火星表面上方h处自由释放一物体,物体落在火星表面时的速度为v1,自释放到着地的时间为t1;在地面上方同样的高度处自由释放一物体,物体落在地面时的速度为v2,自释放到着地的时间为t2。则下列说法正确的是
,假设空气的阻力可忽略不计。在火星表面上方h处自由释放一物体,物体落在火星表面时的速度为v1,自释放到着地的时间为t1;在地面上方同样的高度处自由释放一物体,物体落在地面时的速度为v2,自释放到着地的时间为t2。则下列说法正确的是
A. 火星表面的重力加速度与地球表面的重力加速度之比为b:a
B. 火星的第一宇宙速度与地球的第一宇宙速度之比为
C. 
D. 
高一物理多选题中等难度题查看答案及解析
央视春晚《儿童节目》――“机器人总动员”中机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动.它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作.图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2).
(1)说明怎样建立坐标系,并在合适的坐标系中,画出机器人的运动轨迹.
(2)计算整个过程中机器人的位移大小.
高一物理解答题简单题查看答案及解析
某人从楼顶由静止释放一颗石子,如果忽略空气对石子的阻力,利用下面的哪些已知量可以测量这栋楼的高度(重力加速度g已知)( )
A. 石子落地时的速度
B. 石子下落的时间
C. 石子下落最初1 s内的平均速度
D. 石子下落最后1 s内的位移
高一物理单选题简单题查看答案及解析
某人从楼顶由静止释放一颗石子,如果忽略空气对石子的阻力,利用下面的哪些已知量可以测量这栋楼房的高度H(重力加速度g已知)( )
A.石子落地时的速度
B.石子下落的时间
C.石子下落最初1s内的平均速度
D.石子下落最后1s内的位移
高一物理多选题简单题查看答案及解析
高一物理选择题中等难度题查看答案及解析
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作。图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2)。
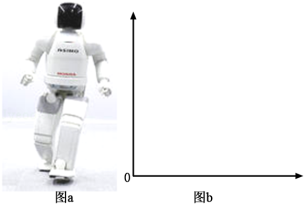
(1)试在图b中完成坐标系的建立并画出机器人的运动轨迹。
(2)计算整个过程中机器人的位移大小。
高一物理解答题中等难度题查看答案及解析
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作。图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2)。
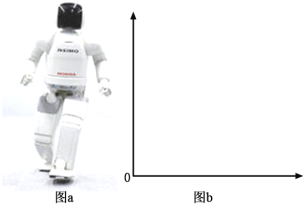
(1)试在图b中完成坐标系的建立并画出机器人的运动轨迹。
(2)计算整个过程中机器人的位移大小。
高一物理解答题中等难度题查看答案及解析
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如:生产业、建筑业或是危险的工作。图a是某公司制作的一个机器人,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1)沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点 (5,5)沿直线运动到点(2,2)。
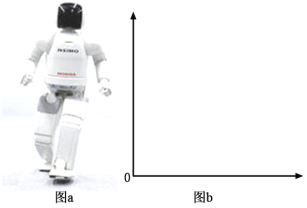
(1)试在图b中完成坐标系的建立并画出机器人的运动轨迹。
(2)计算整个过程中机器人的位移大小。
高一物理解答题中等难度题查看答案及解析